

စက်၏ CNC စနစ်သည် CNC ယူနစ်၊ stepping servo drive unit နှင့် deceleration stepper motor တို့ ပါဝင်သည်။CNC ယူနစ်သည် MGS--51 single-chip မိုက်ခရိုကွန်ပျူတာကို လက်ခံသည်။CNC ယူနစ်၏ ထိန်းချုပ်မှုပရိုဂရမ်သည် အမျိုးမျိုးသောလုပ်ဆောင်ချက်များကို သိရှိနားလည်စေသည့် အဓိကအချက်ဖြစ်သည်။တိကျသော လုပ်ဆောင်မှုအလျား၊ ရွေ့လျားသည့် ဦးတည်ချက်နှင့် အစာအစာအမြန်နှုန်းတို့ကို ဆုံးဖြတ်သည်။ဗဟိုလုပ်ဆောင်မှုယူနစ်၏ ပံ့ပိုးမှုဖြင့်၊ ထည့်သွင်းမှုလုပ်ဆောင်ခြင်းပရိုဂရမ်ဒေတာအရ ထိန်းချုပ်မှုပရိုဂရမ်ကို ယာဉ်မောင်းမှ ချဲ့ထွင်ပြီးနောက် မောင်းနှင်သည့် လိုအပ်သော သွေးခုန်နှုန်းအချက်ပြမှုကို ထုတ်ပေးရန်အတွက် တွက်ချက်ပြီး စီမံဆောင်ရွက်ပါသည်။Stepper မော်တာ၊ စက်ကိရိယာ၏အလိုအလျောက်ထိန်းချုပ်မှုကိုနားလည်ရန်စက်ပိုင်းဆိုင်ရာဝန်အား stepper motor မှမောင်းနှင်သည်။
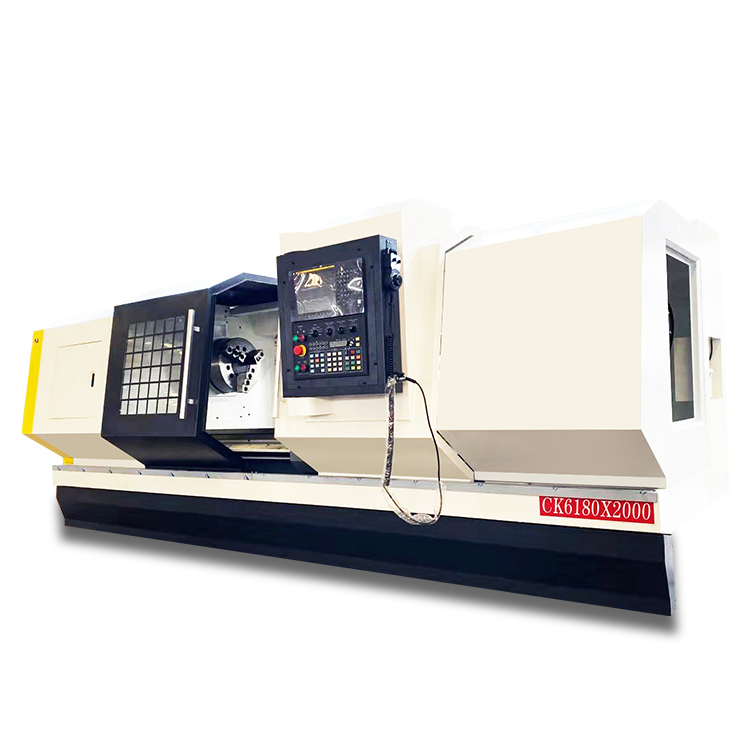
1. စက်ယန္တရားထုတ်လုပ်သူများ၏ စိတ်ကြိုက်ပြင်ဆင်မှု လိုအပ်ချက်များကို ဖြည့်ဆည်းရန် အစီအမံကို ဖွင့်ထားသော LCD မျက်နှာပြင်
2. High-definition LCD ဖန်သားပြင်၊ စက်စက်စနစ်တွင် စကားပြောဆိုမှုကိရိယာ ချိန်ညှိခြင်းလုပ်ဆောင်ချက်ပါရှိပြီး အင်တာဖေ့စ်သည် ပိုမိုဖော်ရွေပါသည်။
3. Resolution ကို ဂဏန်း 7 လုံးဖြင့် သတ်မှတ်နိုင်သည်၊ အပြည့်အဝ အပိတ်-ကွင်းဆက် ထိန်းချုပ်မှု ဖွဲ့စည်းပုံ၊ ထိန်းချုပ်မှု ပိုမိုတိကျမှု
4. ကြွယ်ဝသောကိရိယာလျော်ကြေးငွေ function ကို
5. စက်ပိုင်းဆိုင်ရာတုံ့ပြန်မှုလျော်ကြေးငွေနှင့်အတူဝက်အူအစေးအမှားလျော်ကြေးပေးခြင်းလုပ်ဆောင်ချက်များကို
6. ထူးခြားသောပရိုဂရမ် handwheel စမ်းသပ်မှုလုပ်ဆောင်ချက်၊ တိုက်မှုဆန့်ကျင်စက်၊ ပိုမိုဘေးကင်းသောလည်ပတ်မှု
7. ပရိုဂရမ် သရုပ်ဖော်ခြင်း၊ ကဏ္ဍတစ်ခုတည်း၊ အပိုင်းကို ကျော်ခြင်းနှင့် ပရိုဂရမ်ပြန်လည်စတင်ခြင်း လုပ်ဆောင်ချက်တို့နှင့်အတူ၊ လုပ်ဆောင်ချက်သည် ပိုမိုအားကောင်းသည်။
8. စက်လှေများ၏ စံ G ကုဒ်၊ T ကုဒ်နှင့် S ကုဒ် ပရိုဂရမ်များကို ပံ့ပိုးပေးသည့်အပြင်၊ ၎င်းသည် ပုံသေဖြတ်တောက်ခြင်း သံသရာများ၊ ပေါင်းစပ်စက်ဝန်းများနှင့် MACRO မက်ခရို ပရိုဂရမ်ရေးဆွဲခြင်းတို့ကို ပံ့ပိုးပေးပါသည်။
9. ပရိုဂရမ်သိုလှောင်မှုပမာဏသည် 512 K bytes ဖြစ်ပြီး NC ပရိုဂရမ်အုပ်စုသည် အုပ်စု 1000 အထိရှိသည်။
10. ပရိုဂရမ် ထုတ်လွှင့်မှုကို အလွယ်တကူ သိရှိနိုင်ရန် ကိုယ်ပိုင်ကွန်ပျူတာ (PC) နှင့် ချိတ်ဆက်နိုင်သည့် RS232C စံအင်တာဖေ့စ်ကို ပံ့ပိုးပါ။
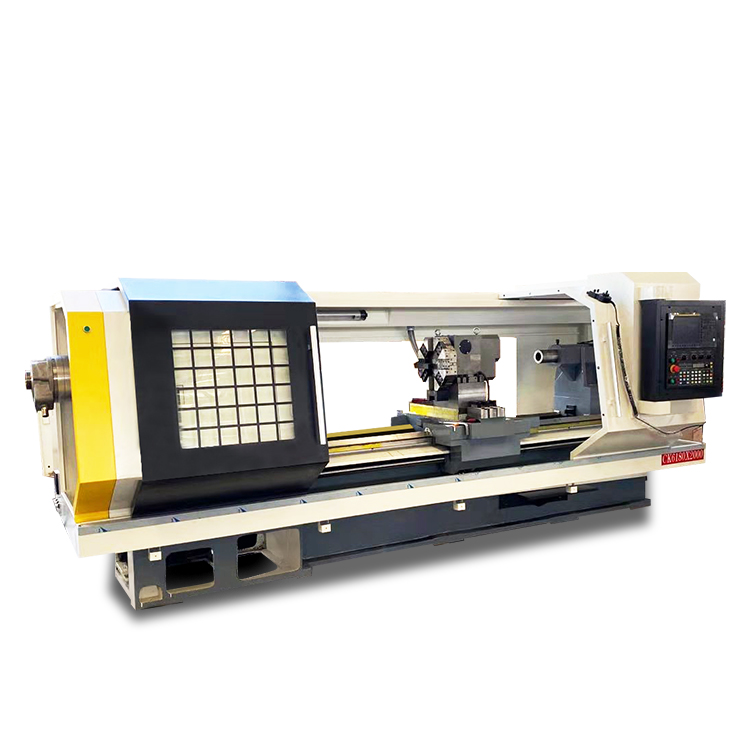
အလုပ်သဘော
စက်ကိရိယာ၏ ဂဏန်းထိန်းချုပ်မှုစနစ်သည် ဂဏန်းထိန်းချုပ်ယူနစ်၊ stepper drive ယူနစ်နှင့် deceleration stepper motor တို့ ဖြင့် ဖွဲ့စည်းထားသည်။ဂဏန်းထိန်းချုပ်ယူနစ်သည် MGS--51 single-chip မိုက်ခရိုကွန်ပျူတာကို လက်ခံသည်။ကိန်းဂဏာန်းထိန်းချုပ်ယူနစ်၏ ထိန်းချုပ်မှုပရိုဂရမ်သည် အမျိုးမျိုးသောလုပ်ဆောင်ချက်များကို သိရှိနားလည်ရန် အဓိကဖြစ်သည်။အစိတ်အပိုင်းများလုပ်ဆောင်ခြင်းပရိုဂရမ်တွင်၊ တိကျသောလုပ်ဆောင်မှုအလျား၊ ရွေ့လျားသောဦးတည်ချက်နှင့်အစာအစာအမြန်နှုန်းကိုပေး၍ ထိန်းချုပ်မှုပရိုဂရမ်သည် ဗဟိုလုပ်ဆောင်ခြင်းယူနစ်၏ပံ့ပိုးမှုဖြင့်ထည့်သွင်းခြင်းလုပ်ဆောင်ခြင်းပရိုဂရမ်ဒေတာအရ၊ တွက်ချက်ခြင်းနှင့် စီမံဆောင်ရွက်ခြင်းအားဖြင့် လိုအပ်သောသွေးခုန်နှုန်းကို ထုတ်ပေးသည်။ အချက်ပြပြီး ယာဉ်မောင်း၏ ပါဝါချဲ့စက်ပြီးနောက်၊ stepper မော်တာအား မောင်းနှင်ပြီး စက်ကိရိယာ၏ အလိုအလျောက် ထိန်းချုပ်မှုကို သိရှိရန် စက်၏ အလိုအလျောက် ထိန်းချုပ်မှုကို သိရှိရန် စက်ဝန်အား stepper motor မှ ဆွဲငင်ပါသည်။ချည်မျှင်များကို machining လုပ်သောအခါ၊ spindle pulse generator သည် spindle angular displacement change signal ကို computer သို့ပို့ရန် configure လုပ်ရပါမည်။ကွန်ပျူတာသည် သတ်မှတ် thread pitch အရ interpolation လုပ်ဆောင်ပြီး အမျိုးမျိုးသော thread များကို လုပ်ဆောင်ရန် tool holder ကို ထိန်းချုပ်သည်။စက်သည် အလိုအလျောက် စက်ဖြင့်ပြုလုပ်ရန် အသုံးပြုသူ လိုအပ်ချက်အရ စနစ်သည် STM အချက်ပြမှုများကို ပေးပို့နိုင် သို့မဟုတ် လက်ခံနိုင်သည်။
ကြိုတင်ကာကွယ်မှုများ
ပါဝါဖွင့်၍ အမှားရှာပြင်ခြင်း။
ဝိုင်ယာပုံဇယားအတိုင်း ပါဝါထောက်ပံ့မှုနှင့် မော်တာပလပ်များကို ထည့်သွင်းပါ၊ ပါဝါအသံချဲ့စက်ခလုတ်ကို ပိတ်သည့်အနေအထားတွင်ထားကာ စနစ်ပါဝါခလုတ်ကို ဖွင့်ပါ။ပါဝါဖွင့်ပြီးနောက်၊ ဂဏန်းထိန်းချုပ်ယူနစ်သည် ပုံမှန်အတိုင်းအလုပ်လုပ်သင့်သည်။ဤအချိန်တွင်၊ axial flow fan ၏လည်ပတ်မှုကို စစ်ဆေးသင့်ပြီး ပန်ကာရပ်သွားသောအခါတွင် အလုပ်မလုပ်ရန် တင်းကြပ်စွာတားမြစ်ထားသည်။ပါဝါအသံချဲ့စက်ခလုတ်ကို ON အနေအထားတွင်ထားပါ။Drive မှန်ကန်မှုရှိမရှိ ကိုယ်တိုင်စစ်ဆေးပါ။ပရိုဂရမ်ထည့်သွင်းမှုအဆင့်များအရ၊ အစိတ်အပိုင်းလုပ်ဆောင်ခြင်းပရိုဂရမ်ကိုထည့်သွင်းရန်ကြိုးစားပါ၊ လုပ်ဆောင်ချက်တစ်ခုစီကိုစစ်ဆေးပါ၊ ထို့နောက်ပုံမှန်ဖြစ်ပြီးနောက်မှသာအွန်လိုင်းပေါ်တွင်အမှားရှာနိုင်သည်။အသုံးပြုခြင်းအတွက် ကြိုတင်ကာကွယ်မှုများ မော်တာ၏ လည်ပတ်မှု ဦးတည်ချက်သည် အမှားရှာပြင်နေစဉ် သတ်မှတ်လမ်းကြောင်းနှင့် ဆန့်ကျင်ဘက်ဖြစ်နေကြောင်း တွေ့ရှိပါက၊ ဦးတည်ချက်ခလုတ်မှတဆင့် ဦးတည်ချက် ပြောင်းလဲနိုင်သည်။စနစ်တွင် ပါဝါကိရိယာ၏ ကန့်သတ်ဘောင်များတွင် မြင့်မားသောလိုအပ်ချက်များရှိနေသောကြောင့် ၎င်းအား အခြားမော်ဒယ်များနှင့် အလိုအလျောက် အစားထိုးခွင့်မပြုပါ။ပါဝါဖွင့်ထားချိန်တွင် ချစ်ပ်ပြားကို ထည့်သွင်းခြင်း သို့မဟုတ် ဆွဲထုတ်ခြင်း သို့မဟုတ် ချစ်ပ်ကို လက်ဖြင့်ထိခြင်းတို့ကို တင်းတင်းကျပ်ကျပ် တားမြစ်ထားသည်။ပြုပြင်ထိန်းသိမ်းစဉ်အတွင်း ဂဟေဆော်ခြင်းကို လုပ်ဆောင်ရမည်ဆိုပါက၊ စနစ်၏ ပါဝါရင်းမြစ်အားလုံးကို ဦးစွာဖြတ်ပစ်သင့်ပြီး ကွန်ပျူတာနှင့်ချိတ်ဆက်ထားသော ချိတ်ဆက်မှုအားလုံးကို ပြင်ပနှင့် ခြားထားသင့်သည်။ထို့အပြင်၊ ကွန်ပြူတာတွင် ဂဟေဆက်ပါက၊ ဂဟေသံ၏ကျန်ရှိသော အပူကို ကွန်ပျူတာစက်အား ပျက်စီးမှုမှ ကာကွယ်ရန် အသုံးပြုသင့်သည်။စနစ်အား ပါဝါဖွင့်ထားပြီးနောက်၊ အချိန်အကြာကြီး မလည်ပတ်ပါက ပါဝါအသံချဲ့စက်ခလုတ်ကို အပိတ်အနေအထားတွင် ထားထားသင့်ပြီး ပါဝါစက်များ ဆုံးရှုံးခြင်းနှင့် ပါဝါဆုံးရှုံးခြင်းတို့ကို လျှော့ချရန်အတွက် အဆင့်တစ်ခုအား အချိန်ကြာမြင့်စွာသော့ခတ်ခြင်းမှ ရှောင်ကြဉ်ရန်၊ .စနစ်ပါဝါဖြတ်ပြီးနောက်၊ ၎င်းကိုပြန်မဖွင့်မီ 30 စက္ကန့်ထက်ပို၍စောင့်ရပါမည်။၎င်းအား ပါဝါကို စဉ်ဆက်မပြတ်ဖွင့်ခြင်းနှင့် ပိတ်ခြင်းအား ခွင့်မပြုပါ၊ သို့မဟုတ်ပါက ကွန်ပျူတာ၏ လက်ရှိလုပ်ဆောင်နေသည့် အခြေအနေသည် မူမမှန်ဖြစ်ကာ အသုံးပြုမှုကို ထိခိုက်စေပြီး အစိတ်အပိုင်းများကို ပျက်စီးစေနိုင်သည်။သန့်ရှင်းသော ပတ်ဝန်းကျင်တွင် စနစ်ကို အသုံးပြုရန် သေချာပါစေ။ဆိုက်ပတ်ဝန်းကျင်သည် အတော်လေးကြမ်းတမ်းနေပါက (သံထည်များနှင့် ဖုန်မှုန့်များ) သည် အသုံးပြုသူသည် စနစ်၏ လေဝင်ပေါက်နှင့် ထွက်ပေါက်များတွင် filter sponges များကို သင့်လျော်သလို ထည့်နိုင်သည်။အရန်ဘက်ထရီ ဂဏန်းထိန်းချုပ်ယူနစ်အား ပါဝါပိတ်ပြီးနောက် ကွန်ပျူတာရှိ အစိတ်အပိုင်းလုပ်ဆောင်ခြင်းပရိုဂရမ်မှတ်ဉာဏ်၏ RAM ချစ်ပ်သို့ ပါဝါထောက်ပံ့ရန်အတွက် အရန်ဘက်ထရီမှ ပါဝါထောက်ပံ့ထားပြီး၊ သုံးစွဲသူ၏အစိတ်အပိုင်းများ၏ လုပ်ဆောင်ခြင်းပရိုဂရမ်ကို သိမ်းဆည်းရန်အတွက် ဖြစ်သည်။အစိတ်အပိုင်းပရိုဂရမ်များ မဆုံးရှုံးစေရန်အတွက် ဘက်ထရီကို ကွန်ပြူတာတွင် ပါဝါဖွင့်ထားခြင်းဖြင့် ဘက်ထရီကို အစားထိုးခြင်း ပြုလုပ်သင့်သည်။ဘက်ထရီကို အစားထိုးသည့်အခါ၊ "+" နှင့် "-" တို့၏ ဝင်ရိုးစွန်းများကို အာရုံစိုက်ပြီး ချိတ်ဆက်မှုကို နောက်ပြန်မဆုတ်ပါနှင့်။ပလပ်ထိုးပြီးနောက်၊ ကွန်ပျူတာရှိဘက်ထရီပေါက်၏ဗို့အားကိုတိုင်းတာရန် မြင့်မားသောအတွင်းပိုင်းခံနိုင်ရည်ရှိသော multimeter ကိုအသုံးပြုပါ။ပုံမှန်ဗို့အားရည်ညွှန်းတန်ဖိုး- 4.5V~4.8V။
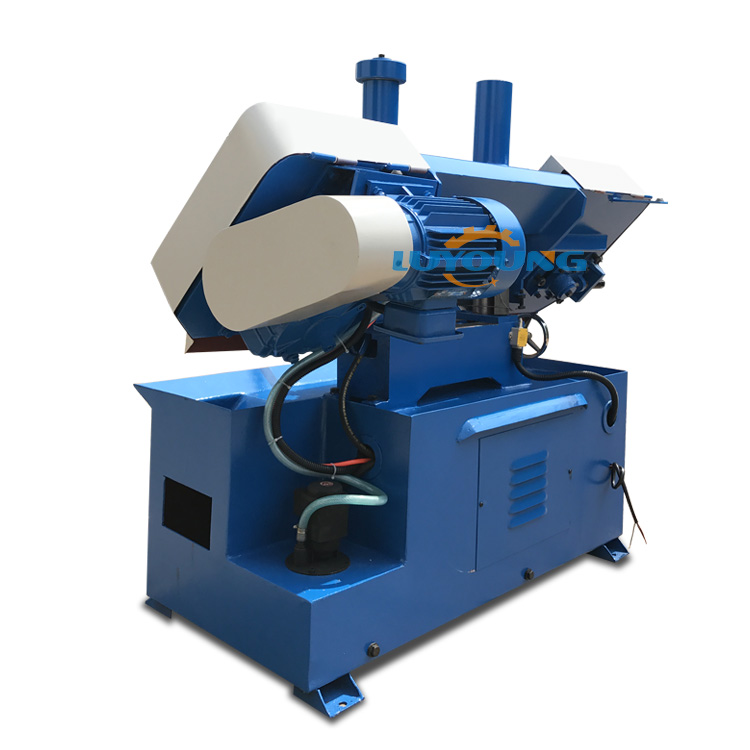
| သတ္တုကြိုးလွှစက် | ||
| ကုသိုလ်ကံ | GT4240 လှည့်ပတ်ထောင့် ကြိုးဖြတ်စက် | GT4240 လှည့်ပတ်ထောင့် (gantry) ကြိုးဖြတ်စက် |
| အများဆုံး sawing အရွယ်အစား(mm) | 0°400၊ 45° 310၊ 60° 210 | |
| လွှဓါးအရွယ်အစား(mm) | 1960X34X1.1 | 5160X34X1.1 |
| လွှဓားအမြန်နှုန်း(m/min) | ၂၇X၄၅X၆၉ | |
| စောဘီးအချင်း(မီလီမီတာ) | ၅၂၀ | |
| feed ၏အရှိန် | ခြေလှမ်းမဲ့ | |
| အဓိက မော်တာ ပါဝါ (kw) | 4KW | |
| ဟိုက်ဒရောလစ်ပန့်မော်တာ ပါဝါ(kw) | 0.75KW | |
| ရေစုပ်မော်တာ(kw) | 0.04KW | 0.09KW |
| clamping အလုပ်လုပ်ခြင်း။ | ဟိုက်ဒရောလစ်ကုပ် | |
| Drive မုဒ် | ပိုးနှင့် ဂီယာ | |
| စုစုပေါင်းအတိုင်းအတာ(mm) | 2300X1400X1800 | 2300X1400X1800 |
| အလေးချိန် (KG) | 1100KG | 1300KG |
လွှကြိုးသည် လွှဘီးနှစ်ခုပေါ်တွင် တင်းမာနေပြီး လွှဘီးသည် လွှကြိုးကို ဖြတ်ရန် မောင်းနှင်သည်။ဒေါင်လိုက်နှင့် အလျားလိုက် ကြိုးဖြတ်စက် နှစ်မျိုးရှိသည်။ဒေါင်လိုက်ကြိုးလွှစက်၏ လွှဘောင်ကို ဒေါင်လိုက်သတ်မှတ်ထားပြီး စာရွက်၏မျဉ်းကွေးပုံစံနှင့် ဖွဲ့စည်းထားသောအပိုင်းကိုဖြတ်တောက်ရန် ဖြတ်တောက်စဉ်အတွင်း အလုပ်အပိုင်းသည် ရွေ့လျားသည်။လွှကြိုးကို ဖိုင်တွဲ သို့မဟုတ် သဲကြိုးဖြင့် အစားထိုးနိုင်သည်။အလျားလိုက်ကြိုးလွှစက်၏ လွှဘောင်ကို အလျားလိုက် သို့မဟုတ် အစောင်းလိုက်စီစဉ်ထားပြီး ဒေါင်လိုက် ဦးတည်ချက် သို့မဟုတ် အမှတ်တစ်ဝိုက်တွင် လှည့်ပတ်သည့် ဦးတည်ချက်ဖြင့် အစာကျွေးသည်။လွှကြိုးသည် ယေဘုယျအားဖြင့် လွှသွားများကို အလုပ်အပိုင်းနှင့် ထောင့်မှန်စေရန် 40° လိမ်ထားသည်။အလျားလိုက် အမျိုးအစားကို ကတ်ကြေးအမျိုးအစား၊ နှစ်ထပ်ကော်လံ၊ ကော်လံတစ်ခုတည်း တီးဝိုင်းလွှဖြင့် ခွဲခြားထားသည်။အသုံးပြုမှုအရ ၎င်းကို manual အမျိုးအစား (စီးပွားရေးလက်စွဲစာကျွေးခြင်းနှင့် ပစ္စည်းများလက်စွဲဖြတ်တောက်ခြင်း) နှင့် အလိုအလျောက်အမျိုးအစားဟူ၍ ပိုင်းခြားထားသည်။ထိန်းချုပ်ကိရိယာကို အသုံးပြု၍ အလိုအလျောက်စနစ်ဖြင့် ပရိုဂရမ်အရ ၎င်းကို manual အမျိုးအစား (Semi-automatic manual feeding) အလိုအလျောက်အမျိုးအစား (အလိုအလျောက် အစာကျွေးခြင်းနှင့် အလိုအလျောက်ဖြတ်တောက်ခြင်း) ဟူ၍ ခွဲခြားနိုင်သည်။ထောင့်ဖြတ်ခြင်းလိုအပ်ချက်အရ၊ ၎င်းကို ထောင့်ဖြတ်ဖြတ်စက် (90 ဒီဂရီနှင့် 45 ဒီဂရီ) တွင် ထောင့်ဖြတ်ခြင်းမရှိဘဲ ထောင့်လွှစက်အဖြစ် ပိုင်းခြားထားသည်။
Double Column အလျားလိုက် Metal Band Sawing Machine Series Band Sawing Machine ၏ ထူးခြားချက်များ-
♣နှစ်ထပ်ကော်လံဖွဲ့စည်းပုံ၊ ဒေါင်လိုက်ရုတ်သိမ်းခြင်း၊ မြင့်မားသောတည်ငြိမ်မှု
♣ဖြတ်တောက်ခြင်းအမြန်နှုန်းကို ဟိုက်ဒရောလစ်ထိန်းချုပ်မှု၊ stepless speed စည်းမျဉ်း
♣ ဟိုက်ဒရောလစ် ကွပ်ထားသော အလုပ်အပိုင်းအစ၊ လည်ပတ်ရလွယ်ကူသည်။
♣ စိတ်ကြိုက်သုံးလမ်း ဟိုက်ဒရောလစ်တင်းတင်းကိရိယာ
♣ ထုတ်ကုန်သည် ကျစ်လစ်သောဖွဲ့စည်းပုံ၊ တည်ငြိမ်သောစွမ်းဆောင်ရည်၊ ရိုးရှင်းသောလည်ပတ်မှု၊ မြင့်မားသောထုတ်လုပ်မှုထိရောက်မှု၊ ခိုင်ခံ့သောဘေးကင်းမှုစသည်ဖြင့် လက္ခဏာများရှိသည်။
♣Saw blade break induction၊ အလိုအလျောက် အရေးပေါ်ပိတ်ခြင်း။
တင်ချိန်- သြဂုတ်-၁၀-၂၀၂၂